Platine de Contrôle Astronomique
Système de contrôle tout-en-un pour équipements astronomiques
Conçu pour simplifier la gestion de votre installation astronomique avec une connectivité avancée et un contrôle précis de tous vos équipements.
Pourquoi ce projet ?
Depuis plus de 20 ans, je pratique l'astrophotographie en amateur. Au fil des sessions d'observation, un impératif revient systématiquement : la préparation du matériel.
Le défi quotidien de l'astrophotographe
Sans abri extérieur suffisamment sécurisé pour protéger notre précieux équipement, l'installation complète du matériel devient une opération longue et délicate. La connectique, les raccordements, les tests préliminaires — tout cela peut se faire de jour, ce qui est préférable. Mais la mise en station précise ne peut s'effectuer qu'en début de nuit, quand les étoiles deviennent visibles.
C'est alors que les problèmes surgissent : un câble qui se déconnecte subitement, une communication qui se perd au moment critique, sans compter les aléas climatiques qui viennent perturber la session. Chaque astrophotographe connaît cette frustration.
La fatigue et les risques d'erreur
Le premier ennemi en astrophotographie, c'est la fatigue. Une fois les réglages minutieux effectués, on lance les séquences de prise de vue et... on attend. Des heures durant. Mais si l'envie vous prend de changer de cible céleste, il faut ressortir dans le noir, s'approcher du télescope — et c'est là que le drame peut survenir : un coup de pied malencontreux contre le trépied, et voilà la mise en station méticuleuse anéantie en une fraction de seconde.
Une solution pensée par l'expérience
Depuis plusieurs années maintenant, je conçois une interface capable d'éliminer chacun de ces problèmes rencontrés lors des différentes sessions. L'objectif : piloter l'intégralité de l'équipement à distance, depuis le confort de l'intérieur, avec une fiabilité maximale et une surveillance complète des paramètres critiques.
Cette platine de contrôle est le fruit de cette réflexion — une solution tout-en-un qui transforme l'expérience de l'astrophotographe, du passionné amateur à l'observateur confirmé.
Objectif principal
Éliminer tous les déplacements nocturnes et contrôler l'intégralité de l'installation à distance
Fiabilité maximale
Surveillance continue des connexions, tensions et températures pour anticiper les problèmes
Gain de temps
Installation simplifiée, séquences automatisées, changements de cible sans risque
La recherche d'une solution : ASCOM ou INDI ?
Pour pallier au premier problème — le besoin de contrôle à distance complet — il fallait choisir un protocole de communication adapté. Après avoir tenté l'approche ASCOM, mon choix s'est porté sur INDI, principalement pour son excellent support et sa stabilité. INDI fonctionne remarquablement bien sur Raspberry Pi 4 en connexion Ethernet, permettant un contrôle confortable depuis un PC sous Ubuntu ou Windows, bien au chaud à l'intérieur.
Les défis de l'installation à distance
Mais le choix du protocole ne résolvait pas tout. Restaient de nombreux problèmes à surmonter : les interfaces, la connectique, l'alimentation, et bien sûr les conditions météorologiques (rosée, givre). Pour une installation en remote, il faut un minimum d'équipements :
- Caméra principale et caméra de guidage
- Focuser motorisé
- Hub USB performant
- Micro-ordinateur (Raspberry Pi)
- Résistances de dégivrage
- Ventilateurs de régulation thermique
Après de nombreuses configurations, j'ai retenu la solution de tout fixer au tube, de réaliser un câblage complet sur celui-ci, et de ne faire sortir que trois connexions essentielles :
- Le câble d'alimentation
- Le câble Ethernet (pas de WiFi — j'y reviendrai)
- Un cordon série pour la commande de la monture et son alimentation
Les limitations rencontrées
Dans le principe, cette configuration semblait satisfaisante. Sauf que les caméras astronomiques fonctionnent en USB 3.0, et le Raspberry Pi ne dispose pas d'assez de ports natifs. Solution : l'ajout d'un hub USB efficace avec au moins 7 ports. Pour information, ce hub a tout de même tenu 3 ans avec quelques modifications — une belle performance dans ces conditions d'utilisation.
Problème suivant : le Raspberry Pi fonctionne traditionnellement avec une carte SD, qui n'est pas fiable dans le temps. Lecture, écriture, lenteur... Modification indispensable : ajout d'un SSD M.2, nécessitant un port USB 3.0 direct du Raspberry Pi.
Vers une solution intégrée
Toutes ces expériences, ces ajouts successifs, ces adaptations et corrections ont progressivement dessiné les contours de ce que devait être la solution idéale: une platine de contrôle intégrée, pensée dès le départ pour gérer tous ces aspects de manière cohérente et fiable.
Le casse-tête de l'alimentation
Un autre problème majeur s'est rapidement imposé : la gestion de nombreux boîtiers — Raspberry Pi, SSD, hub USB — et surtout l'alimentation de tous ces équipements. Il fallait alimenter le hub, le moteur du focuser, les résistances de dégivrage, le Raspberry Pi, la monture, les caméras... Une véritable nébuleuse de câbles et de connexions.
Pour mieux gérer ces alimentations, j'ai créé un boîtier d'alimentation avec prises Jack 12V et intégré un convertisseur buck pour le 5V du Raspberry Pi. Mais les prises Jack standard (5.5×2.1mm) ne dépassent pas 5A en nominal, soit 60W — c'est très peu pour tous les consommateurs du télescope. Pire encore : si les connecteurs femelles ne sont pas de "très haute qualité", le contact est médiocre et la prise peut se déconnecter au moindre effort sur le fil.
Première intégration : le boîtier multifonction
Étape suivante : minimiser les connexions inter-éléments. J'ai créé une boîte intégrant :
- Le Raspberry Pi et son alimentation
- Un panel de sorties Jack
- Une carte hub USB pluggable sur le RPi
- Une petite ventilation
- Un connecteur d'alimentation type GX16 2 broches à connexion vissée pour une fiabilité maximale
Le hub USB et le SSD restaient toutefois hors boîtier (trop volumineux). Pour éviter les problèmes de condensation, j'ai inséré des résistances de chauffage de 5W dans le hub — celui-ci étant en aluminium, excellent conducteur thermique — et monté le boîtier du SSD par-dessus (également en aluminium). Ce montage a fonctionné correctement pendant 3 ans avant que le hub ne déclare forfait.
Depuis ce boîtier, j'ai également ajouté une interface de contrôle pour le chauffage du miroir et la ventilation. Cette interface utilise une liaison GX16 multipoint et permet le contrôle de 4 sorties avec commutation à distance via INDI et relais — une solution qui s'est avérée très pratique pour gérer finement les conditions thermiques du télescope sans intervention manuelle.
Mise au point automatisée : focuser DIY pour lunette guide
La problématique de la mise au point sur lunette guide
Le tube principal (Newton) est équipé d'un focuser motorisé monobloc intégrant micro-moteur + réduction + électronique, alimenté en 12V + USB — une solution professionnelle et efficace. En revanche, la caméra de guidage est montée sur une petite lunette de 50mm sans focuser motorisé.
Problème majeur : il est extrêmement délicat de faire une mise au point parfaite sur cette lunette car il n'y a pas de retour vidéo en temps réel lors du réglage manuel. Il faut donc :
- Régler manuellement la bague de mise au point
- Attendre l'affichage dans PHD2 ou Ekos
- Constater si c'est mieux ou pire
- Recommencer jusqu'à obtenir un résultat acceptable
- Risque de décaler la mise au point en touchant la lunette
Solution DIY économique : focuser motorisé
La solution ? Motoriser la bague de mise au point de la lunette guide avec des composants économiques et une intégration logicielle dans INDI/Ekos.
Composants nécessaires :
- Micro-moteur avec réducteur : ~5 € (moteur DC 12V avec réduction intégrée)
- Courroie crantée GT2 (pas de 2mm) : ~2 €
- Poulies GT2 (moteur + bague) : ~3 €
- Pièces imprimées en 3D : support moteur + attache courroie
- Pont en H DRV8871 : intégré au PCB (~1 €)
- Total : ~10-15 € vs 150-300 € focuser commercial
Architecture électronique : contrôle par DRV8871
Pour commander le moteur DC, un pont en H DRV8871 (Texas Instruments) est intégré directement au PCB de contrôle. Ce composant offre :
- Courant de sortie : jusqu'à 3.6A (largement suffisant pour micro-moteur)
- Tension d'alimentation : 6.5V à 45V (utilisation directe du 12V)
- Contrôle bidirectionnel : rotation dans les deux sens (IN/OUT focus)
- Protection intégrée : surchauffe, surintensité, sous-tension
- Contrôle PWM : vitesse variable pour précision maximale
- Boîtier compact : HTSOP-8 (facile à intégrer en SMD)
Intégration logicielle : pilotage via INDI/Ekos
Le focuser DIY est piloté depuis le Raspberry Pi via INDI, en utilisant les drivers focuser existants. La commande est transparente pour l'utilisateur :
- Module INDI Focuser : compatibilité native avec Ekos/KStars
- Contrôle GPIO : 2 GPIO du RPi → entrées IN1/IN2 du DRV8871
- Commandes disponibles :
- Move IN / Move OUT (pas à pas)
- Go to position (absolu)
- Vitesse réglable
- Autofocus automatique : compatible avec la fonction d'Ekos
- Retour position : comptage des pas pour positionnement répétable
Résultats et performances
Ce montage DIY fournit des résultats excellents :
- Précision : mise au point fine grâce au réducteur et à la courroie
- Répétabilité : positionnement constant d'une session à l'autre
- Autofocus : fonction automatique d'Ekos pleinement fonctionnelle
- Confort : réglage depuis l'ordinateur, pas besoin de toucher la lunette
- Fiabilité : aucun problème en plusieurs années d'utilisation
⚠️ Point d'attention important :
Il faut veiller au serrage correct de la bague de mise au point de la lunette. Si la bague n'est pas assez serrée, elle peut shifter (glisser) sous l'effet de la courroie, surtout lors de changements de position du tube. Un bon réglage initial du couple de serrage est essentiel pour un fonctionnement optimal.
Cette solution démontre qu'avec un investissement minimal et un peu d'ingéniosité, on peut obtenir un focuser motorisé entièrement fonctionnel pour une fraction du prix d'une solution commerciale, tout en conservant une intégration logicielle professionnelle avec INDI/Ekos.
Système de chauffage et ventilation : évolution et fabrication DIY
Évolution du contrôle : du relais au PWM
Le contrôle des résistances de chauffage et des ventilateurs a connu plusieurs évolutions :
- Version initiale : commutation ON/OFF via relais (tout ou rien)
- Version actuelle : couple MIC5021 + IRF540N en PWM permettant un contrôle progressif de la puissance
- Version future : couple MIC5060 + CSD17310Q5A pour gains de place, de performance et de fiabilité
Le contrôle PWM (Pulse Width Modulation) permet d'ajuster finement la puissance délivrée, offrant ainsi un contrôle précis de la température sans les inconvénients du tout ou rien (cycles thermiques, usure des relais, consommation excessive).
Fabrication de résistances de chauffage DIY
Face au prix exorbitant des résistances de chauffage commerciales pour télescopes (souvent 50 à 100 € pour un simple bandeau chauffant), j'ai développé une solution DIY économique et efficace basée sur des bandeaux LED réutilisés.
Principe :
- Utilisation de bandeaux LED standards (ceux à 12V avec groupes de 3 LED)
- Remplacement des LED par des résistances CMS 1206
- Calcul de la valeur des résistances en fonction :
- De la puissance souhaitée par section
- De la longueur du bandeau (périmètre du tube)
- De la tension d'alimentation (12V)
- Les résistances sont montées en groupes de 3 en série (comme les LED d'origine)
Améliorations pour meilleure dissipation thermique :
- Ajout d'un bandeau conducteur thermique en cuivre ou aluminium sous les résistances
- Protection dans une gaine thermorétractable pour isolation et protection mécanique
- Fixation au tube par ressort de rappel ou bande Velcro pour faciliter démontage/entretien
Avantages de cette solution :
- Coût dérisoire : quelques euros de composants vs 50-100 € du commerce
- Personnalisable : adaptation exacte à la taille du tube
- Puissance ajustable : choix précis selon les besoins
- Réparable : remplacement facile d'une section défaillante
- Contrôle PWM : régulation fine de la température
- Démontable : fixation ressort/Velcro pour nettoyage optique
Cette solution DIY démontre qu'avec un peu d'ingéniosité et de connaissances en électronique, on peut obtenir des performances équivalentes voire supérieures aux solutions commerciales pour une fraction du prix, tout en gardant une flexibilité totale d'adaptation à son installation spécifique.
Gestion du point de rosée : le défi critique des Newton
Le problème spécifique aux télescopes Newton
Un télescope Newton présente une problématique particulière : le miroir primaire est directement exposé à l'air ambiant par l'avant du tube. Par temps humide, particulièrement en fin de nuit lorsque les températures chutent, un dépôt de rosée se forme sur le miroir. Pire encore, en début de session, le miroir peut s'embrumer ou même givrer !
Conséquences désastreuses :
- Images inutilisables : la rosée diffuse la lumière et floute les étoiles
- Dépôts permanents : la rosée laisse des résidus (poussières collées, insectes, dépôts gras)
- Session gâchée : impossibilité de photographier tant que le miroir n'est pas sec
- Nettoyage risqué : manipulation délicate du miroir pour le nettoyer
La solution ? Maintenir la température du miroir toujours légèrement supérieure au point de rosée — typiquement 0.5 à 1°C au-dessus suffit, sans surchauffer pour ne pas créer de turbulences thermiques.
Système de mesure et prédiction météorologique
Pour gérer efficacement le point de rosée, le système effectue une mesure constante des paramètres environnementaux :
- Capteur BME280 :
- Température extérieure (précision ±0.5°C)
- Humidité relative (précision ±3%)
- Pression atmosphérique (prédiction tendances météo)
- Calcul du point de rosée en temps réel (formule Magnus-Tetens)
- Récupération des prévisions des stations météo locales via Internet
- Analyse des tendances pour anticipation (pression montante/descendante)
Architecture du système de chauffage du miroir
Le miroir primaire est équipé d'un système de chauffage intelligent monté sur le berceau :
- 3× résistances chauffantes type patch adhésif (20-30W total)
- Répartition uniforme sur le berceau
- Transfert thermique par conduction
- Puissance adaptée à la masse du miroir
- Sonde DS18B20 fixée sur le berceau (feedback température réelle)
- Ventilateur arrière pour homogénéisation thermique
Régulation intelligente automatique
Un programme d'analyse en temps réel module automatiquement :
- Vitesse du ventilateur (contrôle PWM) :
- Faible en début de session (acclimatation douce)
- Augmentée si écart important température miroir/air
- Modulée selon risque de condensation
- Puissance de chauffage (contrôle PWM avec feedback DS18B20) :
- Calcul continu du point de rosée
- Ajustement pour maintenir T_miroir = T_rosée + 0.5 à 1°C
- Gestion de l'énorme inertie thermique du miroir
Point critique : l'inertie thermique
Un miroir de plusieurs kilogrammes possède une inertie thermique considérable. Il faut donc :
- Anticiper les variations de température et d'humidité
- Réagir progressivement : pas de chauffage brutal
- Éviter la surchauffe : 0.5-1°C au-dessus du point de rosée suffit amplement
- Paramétrage précis : constantes PID adaptées à la masse du miroir
Résultat : avec un bon paramétrage, le système évite totalement la buée et le givrage, permettant des sessions d'observation sans interruption, même par forte humidité.
Avantage du miroir secondaire
Le miroir secondaire, lui, est monté dirigé vers le primaire (vers le bas), ce qui le protège naturellement du refroidissement extra-terrestre par rayonnement (vers le ciel noir à -270°C). De plus, le léger flux d'air créé par le ventilateur arrière évite toute condensation sur le secondaire sans nécessiter de chauffage dédié.
Protection anti-condensation du boîtier électronique
La problématique de l'humidité dans le boîtier
Lorsque le matériel est installé à l'extérieur et que le temps est humide, un autre défi se présente : la condensation à l'intérieur du boîtier électronique. Le Raspberry Pi ne fonctionne que pendant les prises de vue, donc aucun apport calorique entre les sessions. Par temps froid et humide, de la condensation peut se former sur les circuits, avec des conséquences potentiellement catastrophiques :
- Courts-circuits entre pistes ou composants
- Corrosion des contacts et des soudures
- Oxydation des connecteurs
- Pannes aléatoires difficiles à diagnostiquer
- Givrage en conditions hivernales
Système de séchage et dégivrage intelligent
Pour contrer ce problème, le PCB intègre un système de séchage/dégivrage actif avec détection automatique de l'humidité :
- Sonde BME280 interne au boîtier :
- Mesure température interne
- Mesure humidité relative
- Détection seuils critiques
- 12 résistances CMS 1812 de 100Ω sous 12V :
- Puissance unitaire : P = U²/R = 144/100 = 1.44W
- Puissance totale : 12 × 1.44W = 17.3W
- Apport calorifique rapide et puissant
- Répartition uniforme sur le PCB
- Ventilateur extracteur avec contrôle PWM :
- Recyclage de l'air interne
- Évacuation de l'humidité vers l'extérieur
- Vitesse variable selon besoin
Fonctionnement autonome prioritaire
Point crucial : ce système fonctionne même appareil éteint grâce à un circuit prioritaire. Tant que l'alimentation 12V est présente, le système de protection anti-condensation reste actif. Cela garantit que l'électronique est toujours protégée, même entre les sessions d'observation ou lors de stockage extérieur prolongé.
Commande du ventilateur : évolution technique
Version actuelle (V2) : Le circuit de commande du ventilateur extracteur utilise des transistors BJT en configuration Darlington :
- BC846 (NPN petit signal) : étage de commande
- BD140 (PNP puissance) : étage de sortie
- Configuration classique et éprouvée
- Contrôle PWM fonctionnel
Amélioration prévue (V3) : Passage à une architecture MOSFET SMD pour :
- Gain de place : composants SMD compacts
- Meilleure efficacité : RDS(on) faible, moins de pertes
- Dissipation réduite : pas besoin de dissipateur
- Commutation plus rapide : PWM haute fréquence possible
- Fiabilité accrue : moins de composants, moins de soudures
Cette protection active anti-condensation garantit la fiabilité à long terme du système, même dans les conditions les plus défavorables. L'électronique reste sèche et opérationnelle en permanence, éliminant les pannes liées à l'humidité.
Cette architecture thermique complète garantit des optiques toujours propres et sèches, condition indispensable pour l'astrophotographie de qualité.
Compatibilité multi-télescopes et modularité
Extension pour télescope Schmidt-Cassegrain
Dès la conception, j'ai voulu que ce boîtier soit compatible avec différents types de télescopes, notamment un Schmidt-Cassegrain. Cette architecture impose des besoins différents du Newton, nécessitant des entrées complémentaires :
- Dégivrage de la lame frontale : sortie de puissance dédiée (la lame fermée du SCT est très sujette à la condensation)
- Dégivrage lunette guide : sortie indépendante pour le chercheur/guideur
- Alimentation caméra guide : reprise des sorties du système Newton
- Moteur de mise au point : architecture différente (voir ci-dessous)
Mise au point sur Schmidt-Cassegrain : problématique du shifting
Sur un Schmidt-Cassegrain classique, la mise au point se fait traditionnellement par déplacement du miroir primaire le long du tube. Problème majeur : ce système provoque un image shift (déplacement latéral de l'image) pendant la mise au point, ce qui est rédhibitoire pour l'astrophotographie de précision et le guidage.
Solution adoptée : le miroir primaire est placé en position fixe, et une mise au point à crémaillère externe est installée sur le mécanisme. Cette crémaillère est couplée à un moteur pas à pas avec réducteur, permettant un contrôle précis sans aucun shifting.
Contrôle du moteur pas à pas : intégration Astroberry
Pour piloter ce focuser à moteur pas à pas, le système utilise l'interface Astroberry Focuser disponible dans INDI, qui commande naturellement un moteur pas à pas via les GPIO du Raspberry Pi.
L'intégration au PCB se fait via un driver DRV88xx (pont en H pour moteur pas à pas) :
- DRV8825 ou DRV8834 : drivers compatibles
- Microstepping : 1/32 pour précision maximale
- Contrôle via GPIO : STEP, DIR, ENABLE depuis le RPi
- Alimentation 12V : directe depuis le rail principal
- Protection thermique : intégrée au driver
Cette architecture permet un contrôle transparent depuis Ekos, avec autofocus automatique, positionnement répétable, et aucun compromis fonctionnel par rapport aux solutions commerciales haut de gamme.
Système de monitoring et supervision avancé
Surveillance thermique : DS18B20 sur tous les composants critiques
Tous les MOSFETs et circuits intégrés de puissance sont équipés de sondes DS18B20 en boîtier SOT-23 (version CMS compacte), placées au verso du PCB directement sous les composants de puissance pour une mesure précise de la température réelle.
- Sondes DS18B20 SOT-23 : précision ±0.5°C, protocole 1-Wire
- Placement stratégique : sous chaque MOSFET de puissance (CSD17310Q5A)
- Placement stratégique : sous les régulateurs (XL4015, LM2596, etc.)
- Bus 1-Wire unique : toutes les sondes sur un seul GPIO de l'ESP32
- Identification unique : adresse ROM 64 bits par sonde
- Surveillance continue : lecture toutes les 10 secondes
L'ESP32 collecte toutes ces données et peut agir en conséquence :
- Alarme température : si un composant dépasse 80°C
- Coupure sécurité : si température critique > 90°C
- Augmentation ventilation : régulation active du refroidissement
- Logs détaillés : historique températures pour diagnostic
Mesure tensions et courants : ADC ADS1115
Pour une supervision complète de l'alimentation, le système intègre 2× convertisseurs ADC ADS1115 (16 bits, I²C) qui mesurent les tensions et courants principaux :
- Tension d'entrée 12V : surveillance du niveau d'alimentation
- Courant total consommé : mesure par shunt haute précision
- Rails 5V et 3.3V : vérification des alimentations logiques
- Courants sorties individuelles : monitoring de chaque charge
Caractéristiques ADS1115 :
- Résolution : 16 bits (précision 0.0001V sur plage 4.096V)
- Canaux : 4 entrées différentielles ou 8 single-ended
- Gain programmable : ×1 à ×16 (adaptation plages de mesure)
- Interface I²C : jusqu'à 4 ADS1115 sur un même bus
- Fréquence : 860 échantillons/seconde (temps réel)
Extensions futures : monitoring prédictif
Le système actuel mesure tensions et courants principaux. L'extension prévue consiste à surveiller individuellement chaque sortie pour obtenir un diagnostic prédictif :
- Courant et puissance par sortie : détection anomalies de consommation
- Surveillance ventilateurs : analyse de la consommation
- Ventilateur normal : courant stable (~200mA)
- Roulements usés : augmentation progressive du courant
- Blocage : pic de courant
- Prédiction de la durée de vie avant défaillance
- Détection courts-circuits : surintensité instantanée
- Optimisation énergétique : statistiques de consommation réelle
- Alertes préventives : notification avant panne
Cette approche de maintenance prédictive permet d'anticiper les défaillances et d'intervenir avant qu'une panne ne compromette une session d'observation. C'est une approche professionnelle rarement vue dans le matériel amateur.
Architecture de supervision globale
Le système de monitoring complet repose sur une architecture distribuée :
- ESP32 : collecte locale, décisions temps réel
- Lecture DS18B20 (températures)
- Lecture ADS1115 (tensions/courants)
- Contrôle PWM (ventilateurs, chauffages)
- Protections immédiates
- Raspberry Pi : supervision globale via INDI
- Interface utilisateur (Ekos)
- Logs et historiques
- Graphiques temps réel
- Alertes notifications
- Communication : ESP32 ↔ RPi via UART ou I²C
Cette architecture garantit une fiabilité maximale : même si le Raspberry Pi est éteint, l'ESP32 continue d'assurer les protections critiques (températures, surintensités, anti-condensation).
Le problème du câblage fixe
Pour limiter les contraintes mécaniques sur les câbles, tout était rilsané au support du tube. L'inconvénient ? Lors d'une modification ou d'un simple nettoyage, il fallait tout défaire et tout refaire. Une opération fastidieuse et risquée.
Le défi de l'alimentation : fiabilité avant tout
L'alimentation de ce projet était initialement assurée par une alimentation 12V 30A placée dans un coffret étanche au pied du télescope, avec des connecteurs de type GX16. Cette alimentation de fabrication "chinoise" utilisait des composants éprouvés tels que le TL494 (ou dérivés) et des transistors 2SD13009.
Le problème ? La qualité des composants n'était pas au rendez-vous, et les pannes étaient courantes : claquage des condensateurs, dessoudage des composants... Or, l'alimentation doit être irréprochable et fonctionner sans interruption pendant toute une nuit. Impossible de tolérer une défaillance en pleine session d'acquisition.
Conception d'une alimentation quasi-indestructible
Il fallait donc imaginer une nouvelle alimentation pratiquement indestructible, capable de fournir plusieurs centaines de watts sans broncher, et surtout sans que cela soit hors de prix. Mon choix s'est porté sur une alimentation 12V 50A d'environ 30 euros, que j'ai entièrement refaite :
- Remplacement de tous les condensateurs électrolytiques par des modèles 105°C long life de marques reconnues (Panasonic, Kemet, Vishay...) avec surclassement en tension
- Simplification du filtrage d'entrée : remplacement des deux condensateurs de filtrage en série par un seul (470µF à 820µF/450V) et suppression du commutateur 110-220V
- Filtrage optimisé : installation de condensateurs de qualité avec très faible ESR en sortie, complétés par des condensateurs film en parallèle pour le filtrage haute fréquence
Cette alimentation modifiée s'est révélée d'une fiabilité exemplaire, capable de délivrer une puissance stable pendant des sessions de plusieurs heures sans défaillance.
Alimentation redondante et système sans coupure
Améliorer la durée de vie de l'alimentation était une chose, mais il fallait également l'alimenter correctement, vérifier la tension de sortie et prévoir une alimentation redondante en cas de panne. De plus, le système devait être sans coupure pour garantir la continuité des acquisitions.
J'ai donc créé une platine de distribution avec monitoring intégrant :
- Filtre d'entrée secteur pour une alimentation propre
- Double entrée redondante 12V avec basculement automatique
- Sortie 12V capable de débiter jusqu'à 80A
- Monitoring complet via ESP32 (tensions, courants, état des alimentations)
- Câble de sortie 4×AWG14 avec prise GX20 4 broches (alimentation doublée pour sécurité)
- Intégration dans un coffret étanche en fibre pour protection extérieure
Note : Le détail complet de cette platine de distribution fera l'objet d'un article dédié.
L'interface avec la monture : fiabilité de la liaison série
Ma monture, une Skywatcher EQ6R-Pro, fonctionne parfaitement avec EQMOD sur INDI via liaison série. Mais après avoir essayé de nombreux convertisseurs USB-série à base de FTDI FT232, le fonctionnement était aléatoire avec des pertes de connexion inexpliquées sur la liaison.
J'ai finalement opté pour l'achat d'un dongle Skywatcher officiel, qui fonctionne sans problème avec EQMOD. Après inspection du PCB, il s'avère que celui-ci utilise un PL2303SA de Prolific travaillant en protocole USB 1.1. Fort de cette découverte, j'ai intégré ce chip (coût : moins de 1 € !) directement dans les fonctionnalités du PCB pour garantir une compatibilité parfaite.
Alimentation optimisée de la monture
Autre point concernant cette monture : l'alimentation. Le constructeur indique une plage de tension d'entrée de 11 à 16V (moteurs standard NEMA17), mais en alimentation 12V, avec les pertes en ligne et les appels de courant importants lors des pointages rapides, il est possible de descendre à 11V voire moins.
Pour contrer les chutes de tension et redonner plus de puissance aux moteurs, j'ai installé une alimentation spécifique dédiée à la monture en 15V 5A (75W nominal). Résultat : la monture a beaucoup plus de punch lors des pointages rapides. Cette alimentation boost est construite autour d'un LT3757AEMSE (contrôleur) + CSD17310Q5A (MOSFET) + STPS3045C (diode Schottky), une architecture éprouvée pour les fortes puissances.
Évolution de la commutation de puissance des sorties
Dans les versions précédentes du système, la commutation des sorties s'effectuait par relais de puissance. Cette solution présentait plusieurs inconvénients majeurs :
- Encombrement important : les relais occupent beaucoup d'espace sur le PCB
- Durée de vie limitée : nombre de cycles de commutation restreint (typiquement 100 000 cycles)
- Risque de collage des contacts, particulièrement critique en courant continu avec charges inductives
- Bruit mécanique audible lors des commutations
- Consommation des bobines de commande
Première évolution : MIC5021 + IRF540NS
Le passage à la commutation par MOSFET a permis de résoudre ces problèmes. Le premier choix s'est porté sur le couple MIC5021 (driver à pompe de charge) + IRF540NS (MOSFET canal N). Cette solution offrait :
- Commutation silencieuse (électronique)
- Durée de vie quasi illimitée (pas d'usure mécanique)
- Temps de commutation < 1µs (vs ~10ms pour un relais)
- Aucun risque de collage
Optimisation finale : MIC5060 + CSD17310Q5A
Une seconde optimisation a permis d'aller encore plus loin avec le couple MIC5060 + CSD17310Q5A. Cette évolution apporte :
- Gain de place significatif : boîtier plus compact du MIC5060
- Réduction du coût : meilleur rapport performance/prix
- RDS(on) ultra-faible : 1.7mΩ typ pour le CSD17310Q5A (vs 44mΩ pour l'IRF540NS)
- Pertes par conduction divisées par 26 : dissipation thermique minimale
- Courant max : 100A pour le CSD17310Q5A (vs 33A pour l'IRF540NS)
Cette architecture MOSFET pilotée par driver à pompe de charge garantit une commutation rapide, fiable et efficace de toutes les sorties de puissance, avec une durée de vie pratiquement illimitée.
La solution finale : conception du PCB intégré
Enfin, pour réduire voire supprimer tous les problèmes restants, j'ai décidé de concevoir un PCB dédié intégrant toute l'électronique dans un seul boîtier aux dimensions minimales, tout en laissant le champ libre aux futures extensions.
Cette carte mère a été conçue avec les objectifs techniques suivants :
Protection et gestion de l'alimentation d'entrée
- Connecteur d'entrée GX20 dimensionné pour 50A nominal
- Fusible électronique commandé NCP81292 pour protection intelligente
- Protection contre les inversions de tension
- Mesure de tension d'entrée pour monitoring continu
Alimentations embarquées haute performance
- Buck 5V 5A (XL4015) spécifique pour le Raspberry Pi 4, avec filtre en π et filtrage HF pour éliminer les perturbations
- Buck 3.3V haute qualité (LM2596) avec filtrage en π pour la section digitale
- Buck ultra-propre pour l'analogique (LM2596-ADJ) avec :
- Filtre passe-bas du 5e ordre
- Régulation finale via LDO LP38693 3.3V
- Découplage multi-fréquence pour bruit résiduel minimal
Cette architecture d'alimentation à trois rails distincts garantit que les sections digitales bruyantes (ESP32, Raspberry Pi) n'interfèrent jamais avec les mesures analogiques de précision (capteurs de température, tension, courant).
C'est cette vision qui a donné naissance à la platine de contrôle que vous découvrez aujourd'hui — une solution pensée, éprouvée et optimisée au fil de 20 années d'expérience sur le terrain.
Synoptique de fonctionnement
Le synoptique ci-dessous présente l'architecture complète de la platine de contrôle astronomique, incluant les alimentations, les contrôleurs, les interfaces et tous les périphériques connectés.
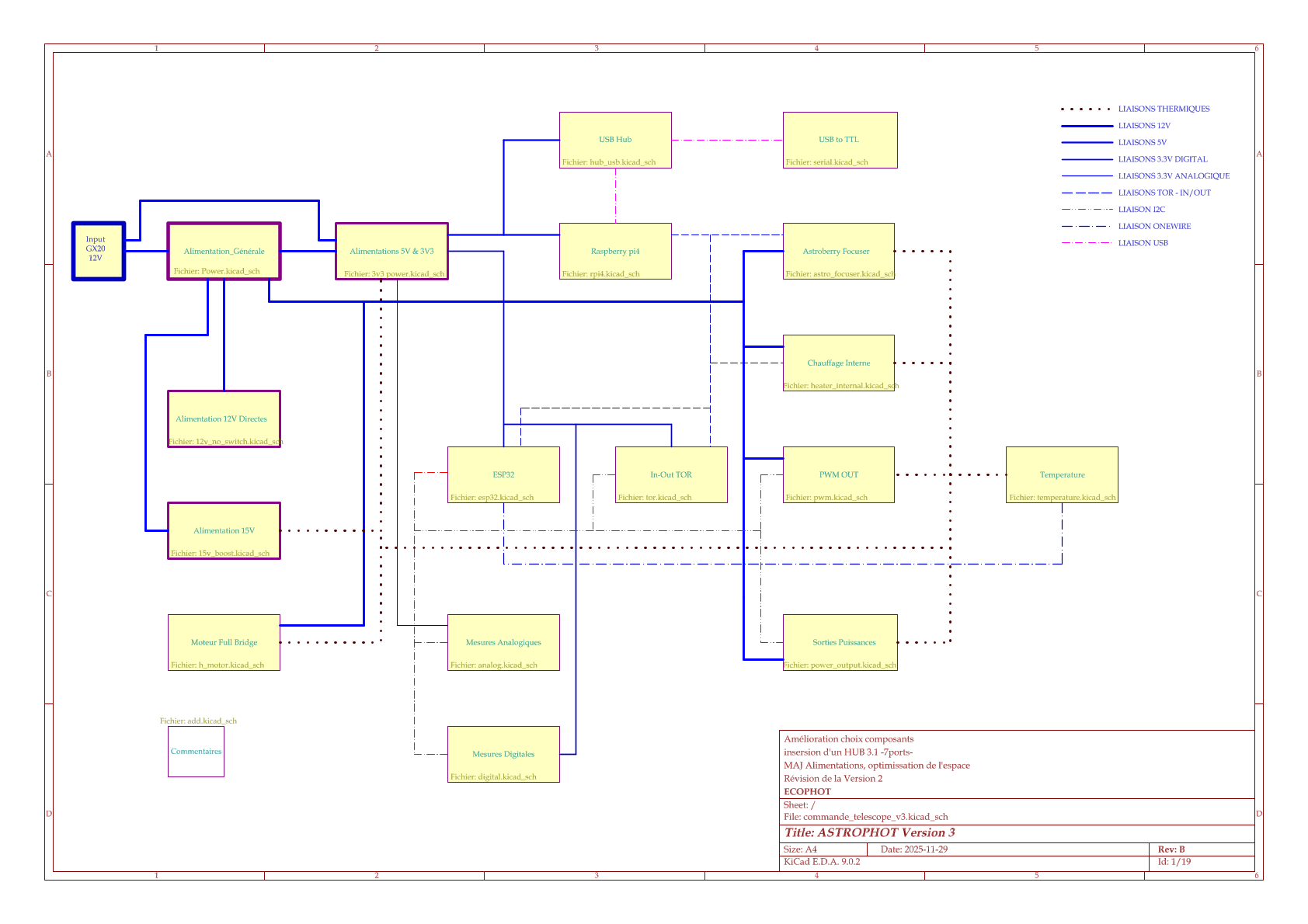
Synoptique ASTROPHOT Version 3 - Architecture complète du système de contrôle montrant les liaisons d'alimentation (12V, 5V, 3.3V), les connexions de données (USB, I2C, TTL, OneWire) et l'intégration de tous les composants (ESP32, Raspberry Pi 4, capteurs, actuateurs).
Légende des liaisons
Gestion d'alimentation avancée
Distribution intelligente de l'alimentation avec surveillance en temps réel des tensions et courants:
- Entrée 11-14V / 30A maximum (Protection 50A)
- 2 sorties directes 12V avec protection Polyfuse 5A chacune
- 4 sorties 12V contrôlées par MOSFET pour activation à distance
- 2 sorties 12V PWM via MOSFET pour variation de puissance
- Alimentation dédiée 15V 5A pour monture astronomique
- Alimentation buck 5V 5A pour Raspberry Pi interne
Contrôle télescope spécialisé
Fonctions dédiées pour une gestion optimale de votre instrument:
- PWM pour ventilateur de mise en température du télescope
- PWM pour résistance de désembuage du miroir principal
- Ventilateur et résistance anti-humidité/hors gel intégrés
- Convertisseur USB-TTL compatible EQMOD avec sortie RJ45
- Connectique professionnelle GX16/GX12 pour connexions fiables
Gestion de mise au point
Contrôle précis de la mise au point pour des images parfaites:
- Contrôleur de moteur pas-à-pas NEMA17 pour focuser principal
- Contrôle de 2 micro-moteurs supplémentaires pour focuseurs secondaires
- Détection de fin de course pour sécurité maximale
- Contrôle via Raspberry Pi intégré pour automatisation complète
- Possibilité de contrôle par logiciels d'astrophotographie standard
Monitoring environnemental
Surveillance complète des conditions d'observation:
- Capteur BME280 interne (température et humidité)
- Environ 10 capteurs DS18B20 pour surveillance des MOSFET
- Entrée PT100 pour mesure de température extérieure ultra-précise
- Convertisseur A/D pour mesure précise des tensions
- Gyroscope intégré pour position (X,Y,Z), angle et azimut
Connectivité étendue
Options d'interfaçage multiples pour une intégration complète:
- Hub USB 3.2 4 ports pour connexion d'équipements externes
- Sortie I2C pour capteurs de mesure supplémentaires
- GPIO Raspberry Pi en connexion avec ESP32
- Extensions possibles via TTL, I2C pour ESP32
- Extensions supplémentaires via I2C, SPI pour Raspberry Pi
Contrôle à distance
Pilotage complet depuis n'importe où:
- ESP32 centralisant toutes les commandes et informations
- Communication WiFi pour contrôle à distance
- Interface web responsive pour smartphone et ordinateur
- Compatibilité avec logiciels d'astronomie standard
- Alertes automatiques en cas de problème détecté
Spécifications techniques détaillées
| Caractéristiques électriques | |
|---|---|
| Tension d'alimentation | 11-14V DC |
| Intensité maximale | 30A |
| Protection | 50A e-fusible, gestion automatique |
| Connecteur d'entrée | GX20 4 broches, verrouillable |
| Sorties directes 12V | 2× protégées par polyfuse 5A |
| Sorties contrôlées 12V | 4× via MOSFET |
| Sorties PWM 12V | 2× via MOSFET |
| Sortie monture | 15V 5A |
| Alimentation Raspberry Pi | 5V 5A (buck converter) |
| Contrôleurs et interfaces | |
|---|---|
| Microcontrôleur principal | ESP32 Wroom 32D |
| Antenne WiFi | Externe déportée pour meilleure réception |
| Ordinateur embarqué | Raspberry Pi (compatible avec Pi 3, Pi 4) |
| Hub USB | 4 ports USB 3.2 |
| Interface monture | Convertisseur USB-TTL compatible EQMOD (sortie RJ45) |
| Contrôle focuser | Contrôleur NEMA17 + 2 contrôleurs micro-moteurs |
| Bus d'extension | I2C, SPI, TTL |
| Capteurs et monitoring | |
|---|---|
| Capteur environnemental | BME280 (température, humidité) |
| Capteurs de température MOSFET | DS18B20 (×10 environ) |
| Mesure température haute précision | Entrée pour sonde PT100 |
| Mesure tension | Convertisseur A/D haute précision |
| Positionnement | Gyroscope intégré (position X,Y,Z, angle, azimut) |
| Connectique | |
|---|---|
| Entrée alimentation | GX20 4 broches |
| Sorties auxiliaires | GX16, GX12 |
| Sortie spécifique | Jack 5.1mm |
| Interface monture | RJ45 |
| USB | 4× USB Type A (3.2) |
| Caractéristiques mécaniques | |
|---|---|
| Construction | Sans élément mobile pour fiabilité maximale |
| Refroidissement | Passif + ventilateur contrôlé par température |
| Indice de protection | IP54 (résistant aux projections d'eau et poussière) |
| Température de fonctionnement | -20°C à +50°C |
| Protection hors gel | Résistance chauffante intégrée |
Visualisation 3D du projet
Explorez notre platine de contrôle astronomique sous tous les angles grâce à ces modèles 3D interactifs.

Platine Principale
Visualisation 3D interactive de la platine principale avec tous ses composants et connecteurs.

Platine Fille
Modèle 3D de la platine fille permettant de voir en détail les circuits et connexions.

Boîtier Complet
Visualisation du boîtier de protection avec ses ouvertures pour la ventilation et les connexions.
Visualisation du projet
Explorez notre platine de contrôle astronomique sous tous les angles à travers ces images détaillées.

Face avant
Projet terminé, face avant avec interfaces suivantes :
- 2 ports USB 2.0 rapportés
- 2 ports USB 2.0 et un USB 3.0 natifs RPi
- Connexion réseau LAN
- Antenne WiFi ESP
- Port série pour EQMOD (contrôle monture Skywatcher)
- Prise GX12 pour sonde PTC100

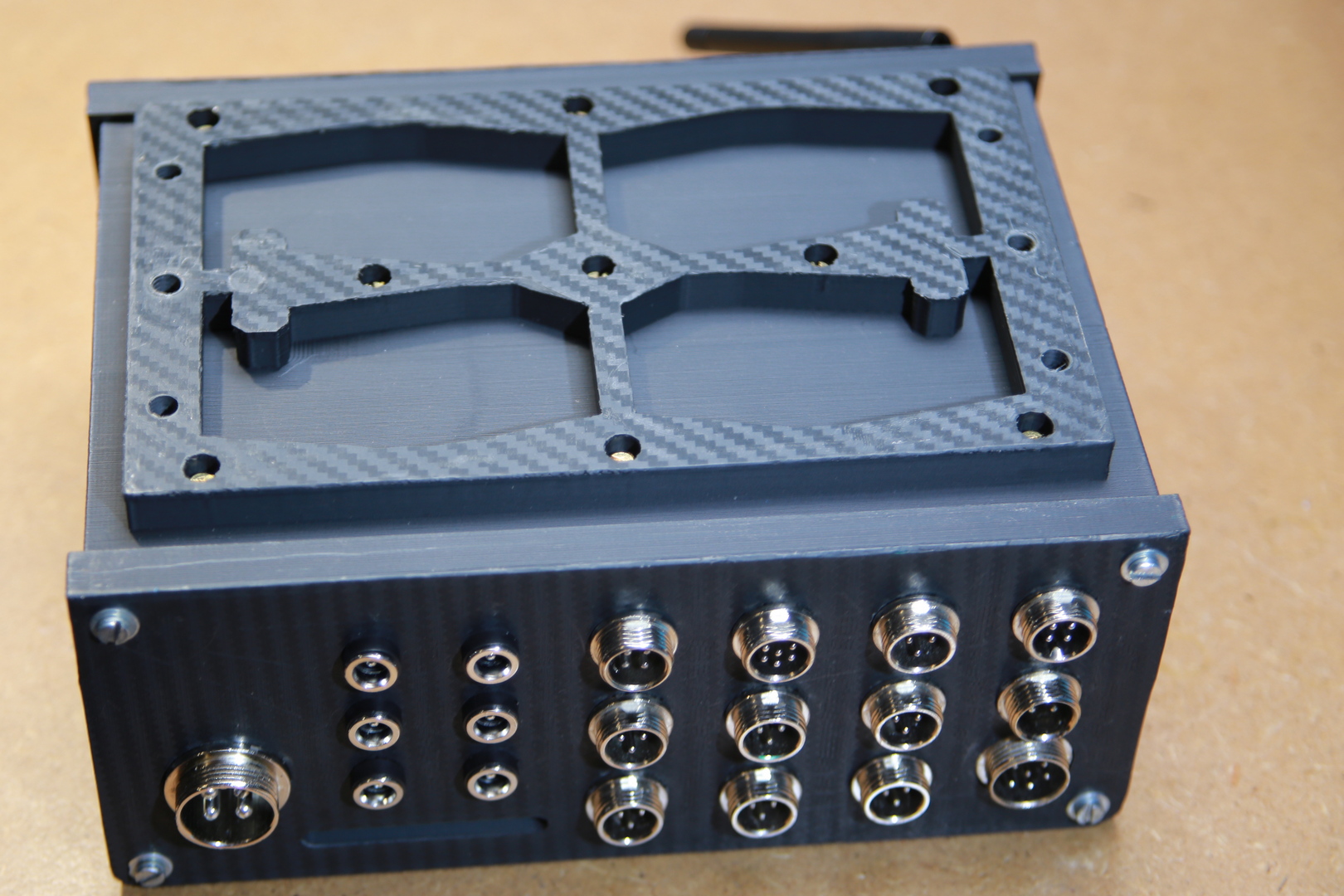
Face arrière
Vue de la face arrière du boîtier avec tous les connecteurs de sortie et d'alimentation.

Connectique complète
Détail de l'ensemble des connexions disponibles :
- GX12 3pin - Connexion caméras et résistances chauffantes
- GX12 4pin - Connexion sonde calcul noirceur du ciel
- GX12 4pin 180° - Sortie pour moteur MAP NEMA17
- GX12 2pin - Sortie alimentation monture 15V 5A
- GX16 6pin - Contrôle tube télescope (ventilation, chauffage, température miroir)
- 6 prises jack 5.1mm - Sorties 12V commandées pour auxiliaires
- GX20 4pin - Alimentation générale 12V 30A maximum
Système de fixation
Entretoises spécifiques pour fixation sur platine Losmandy de marque "ADM", permettant une installation stable et sécurisée de l'appareil sur votre équipement astronomique.
Vues éclatées du projet
Découvrez l'architecture interne de notre platine de contrôle avec ces images détaillées des composants internes.

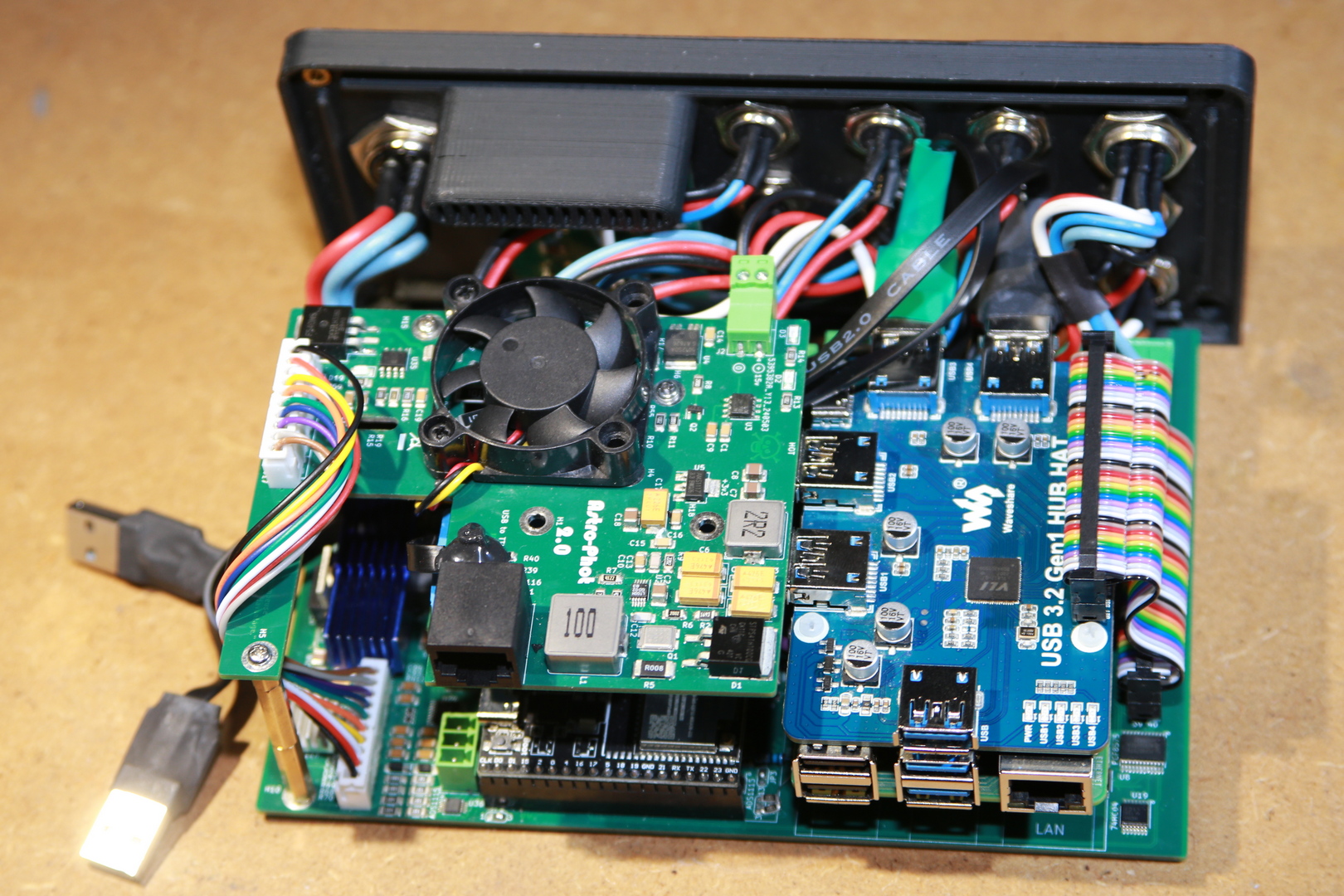
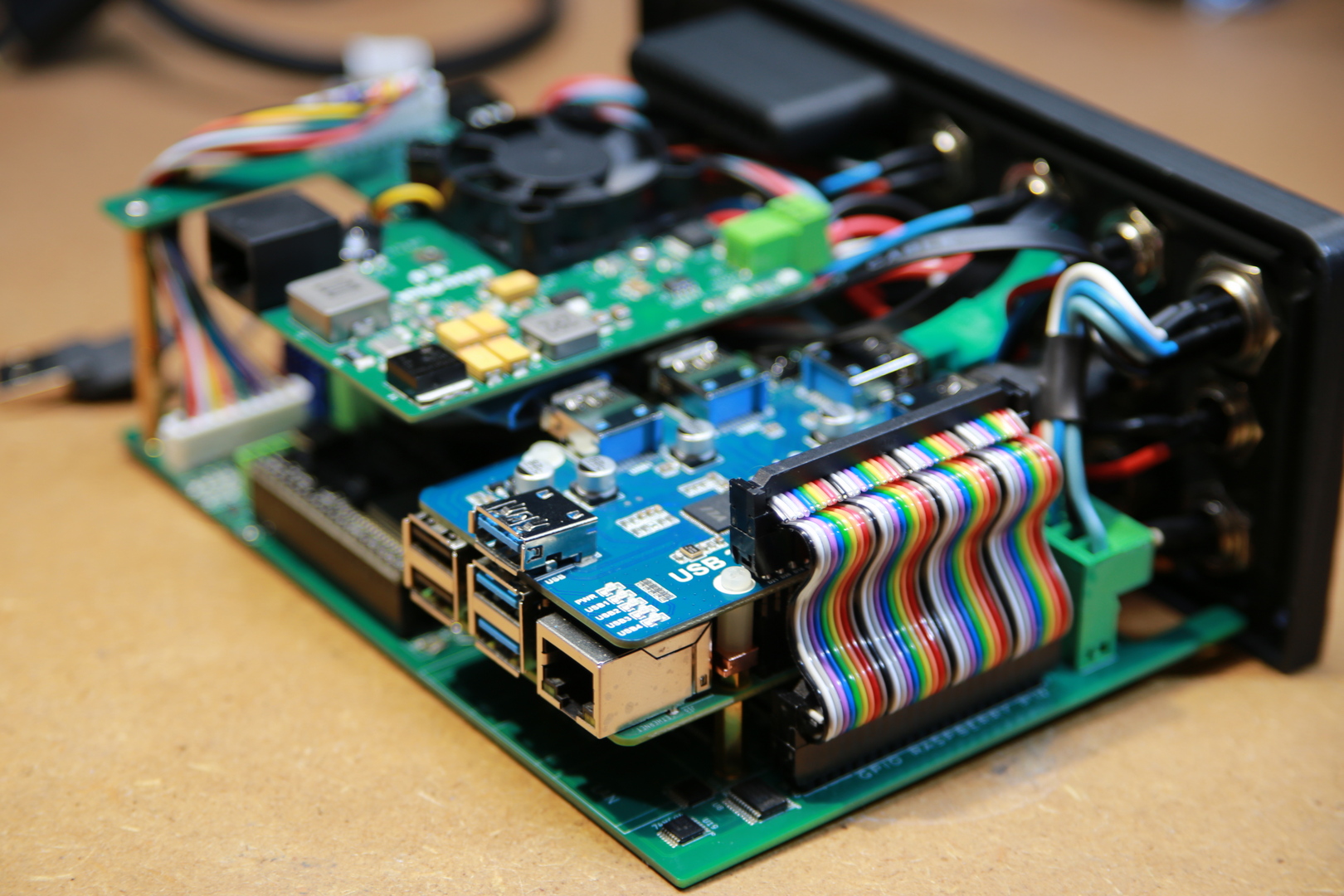
Intégration dans le boîtier
Vue du boîtier sans face avant, montrant l'agencement interne des composants principaux :
- Carte mère et ESP32 positionnés sur la droite
- Raspberry Pi 4 avec HAT (carte d'extension)
- Hub USB 3.2 en haut
- Carte fille au centre, équipée d'un connecteur RJ45 pour communication avec la monture
Vue d'ensemble du prototype
Vue assemblée du prototype complet montrant l'intégration de tous les composants principaux.
- Carte mère avec ses différents circuits
- Raspberry Pi 4 correctement installé
- Hub USB pour connexions externes
- Carte fille avec ses interfaces spécialisées
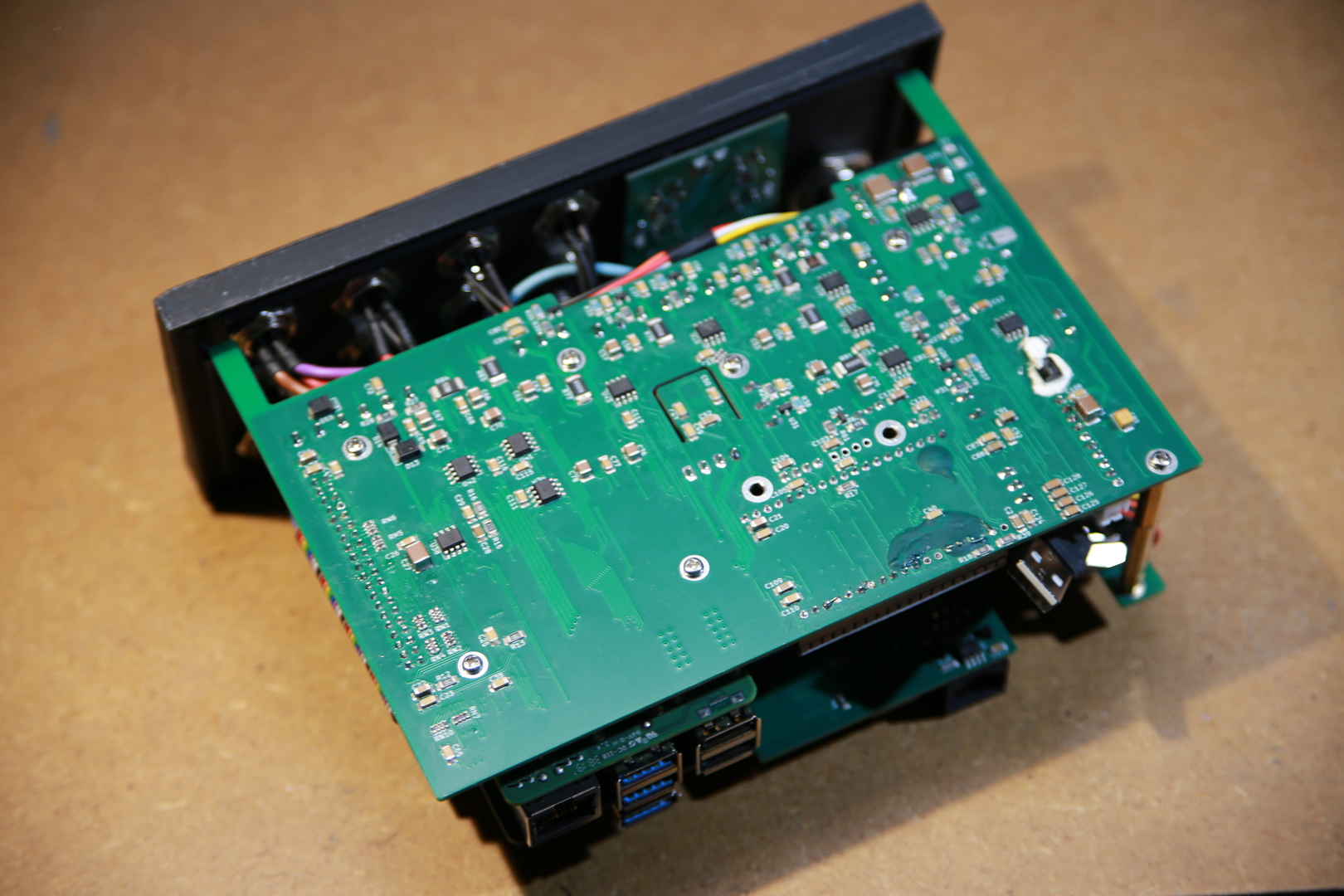
Dessous de la carte mère
Vue détaillée de la carte mère côté pistes, révélant la complexité du circuit imprimé :
- Vernis de protection vert sur les corrections apportées au prototype
- Nombreux circuits intégrés servant de sondes de température pour les MOSFET
- Ajout d'une sonde en post-production sur le régulateur 3V3 (visible en bas à gauche)
- Condensateurs de découplage pour les circuits de l'autre côté du PCB
Intégration du Raspberry Pi
Vue de côté montrant l'installation et le refroidissement du Raspberry Pi 4 :
- Raspberry Pi 4 avec son hub USB
- Système de dissipation thermique par radiateur passif
- Limande faite sur mesure pour la connexion du GPIO du RPi à la carte mère
- Câblage de forte section (0.75 à 2x2.5mm²) reliant la carte mère aux connecteurs
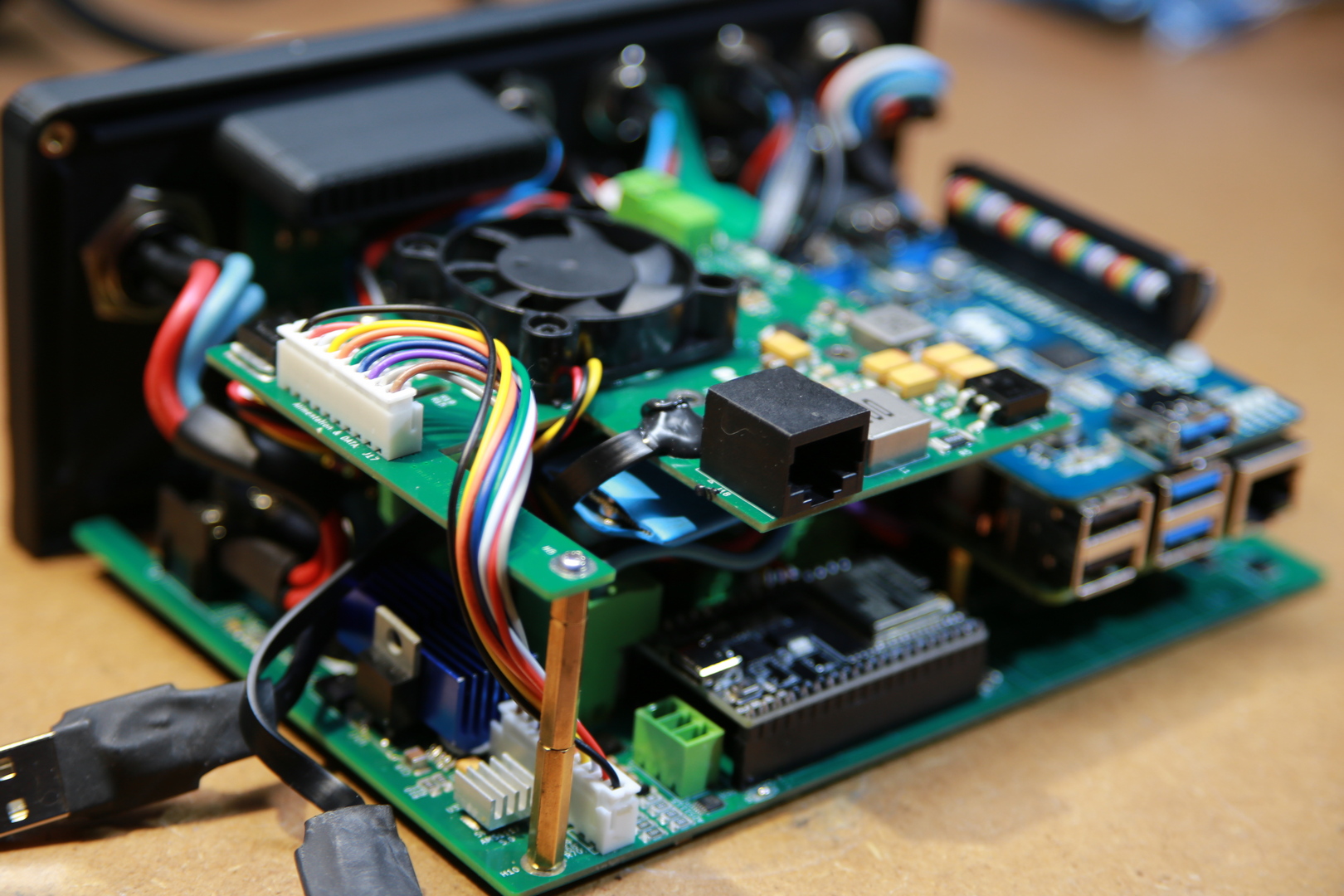
Installation de la carte fille
Détails sur le montage et les connexions de la carte fille :
- Fixation sur la carte mère par entretoises en laiton (assurant la conduction de la masse)
- Connecteurs d'alimentation et interfaces pour diverses fonctions
- Ventilateur visible en arrière-plan
- Disque SSD bleu installé sous la carte fille
- Dissipateurs thermiques sur la carte mère
- Câblage d'alimentation en 2x2.5mm²
- Prises USB en premier plan pour connexion à la façade
Applications astronomiques
Astrophotographie
Contrôle complet de l'équipement photographique avec gestion précise de la mise au point, suivi automatique et séquençage des prises de vue.
Observatoire distant
Pilotage à distance de l'ensemble d'un observatoire avec protection contre les intempéries et surveillance des conditions environnementales.
Gestion thermique
Contrôle optimal de la température du télescope avec acclimatation, prévention de la condensation et protection contre le gel.
Automatisation
Séquençage automatique des opérations d'observation avec démarrage, calibration, acquisition et arrêt selon des scénarios programmés.
Gestion d'énergie
Distribution intelligente de l'alimentation avec priorisation des équipements critiques et économie d'énergie pour les systèmes autonomes.
Monitoring
Surveillance complète des conditions d'observation et de l'état des équipements avec historique et alertes configurables.
Compatibilité logicielle
INDI Library
Compatible avec la bibliothèque INDI pour le contrôle d'équipements astronomiques sous Linux.
ASCOM Platform
Support ASCOM pour les systèmes Windows via connexion réseau.
KStars / Ekos
Intégration complète avec la suite d'astrophotographie Ekos/KStars.
Sequence Generator Pro
Compatible avec SGP pour la planification et l'automatisation de sessions.
PHD2 Guiding
Support de PHD2 pour l'autoguidage de précision.
API ouverte
Interface de programmation documentée pour intégrations personnalisées.
Propulsez votre astronomie au niveau supérieur
Notre équipe d'experts est à votre disposition pour concevoir et configurer une solution adaptée à votre configuration astronomique spécifique.