Carte Contrôleur Moteur NEMA23
Réf : MOTOR-NEMA23-OBS | Session 5 — Avril 2026
Commande automatisée 100% remote d'un toit coulissant d'observatoire astronomique. STM32 + TMC4361A + TMC2160, CAN bus, rampes S-curve matérielles, PCB 6 couches 24V/2A.
Objectif du projet
Motorisation complète d'un toit plat coulissant d'observatoire astronomique (course 2000 mm, 2 panneaux indépendants), avec fonctionnement 100% remote sans aucune intervention manuelle sur site. La monture allemande impose un telescope en position park horizontal ; la mécanique intègre un pignon mobile côté Nord avec système guillotine (descente 500 mm, contrepoids, 2× NEMA17).
Deux cartes moteur identiques pilotent chacune un panneau via un NEMA23 (2A RMS). Elles sont supervisées par un ESP32 maître sur CAN bus, lui-même connecté en WiFi/MQTT pour les interfaces ASCOM et INDI.
Architecture système
- ESP32 maître : WiFi/MQTT, ASCOM/INDI, séquençage, OTA flash STM32, 2× TMC2209 (guillotine NEMA17), CAN maître
- 2× Carte moteur : STM32F103C8T6 + TMC4361A + TMC2160 + pont H DMHT6016LFJ, CAN esclave
- CAN bus daisy-chain : ESP32 → Carte 1 (JP3 ouvert) → Carte 2 (JP3 = 120Ω fin de ligne)
- Alimentation : 24V/5A partagée, buck TPS5430 24V→3,3V sur chaque carte
Avancement
- ✅ Architecture complète validée — 5 sessions de conception
- ✅ Schématique KiCad vérifié, corrections post-revue identifiées
- ✅ Pinout STM32 / TMC4361A / TMC2160 vérifié sur datasheets
- ✅ Protections pont H, alimentation, inversion polarité finalisées
- 🔲 Application des corrections dans KiCad — routage PCB en cours
- 🔲 Firmware STM32 (CAN, SPI, homing, rampes S-curve)
- 🔲 Firmware ESP32 maître (CAN, séquençage, INDI/ASCOM)
Vue 3D du PCB
PCB 6 couches — Carte moteur NEMA23
Vue 3D du circuit imprimé généré sous KiCad. On distingue le STM32F103C8T6, le TMC4361A (QFN-40), le TMC2160-TA (TQFP-48), les deux boîtiers DMHT6016LFJ (pont H quad MOSFET), le buck TPS5430DDA, le transceiver CAN SN65HVD230 et l'ensemble des connecteurs.
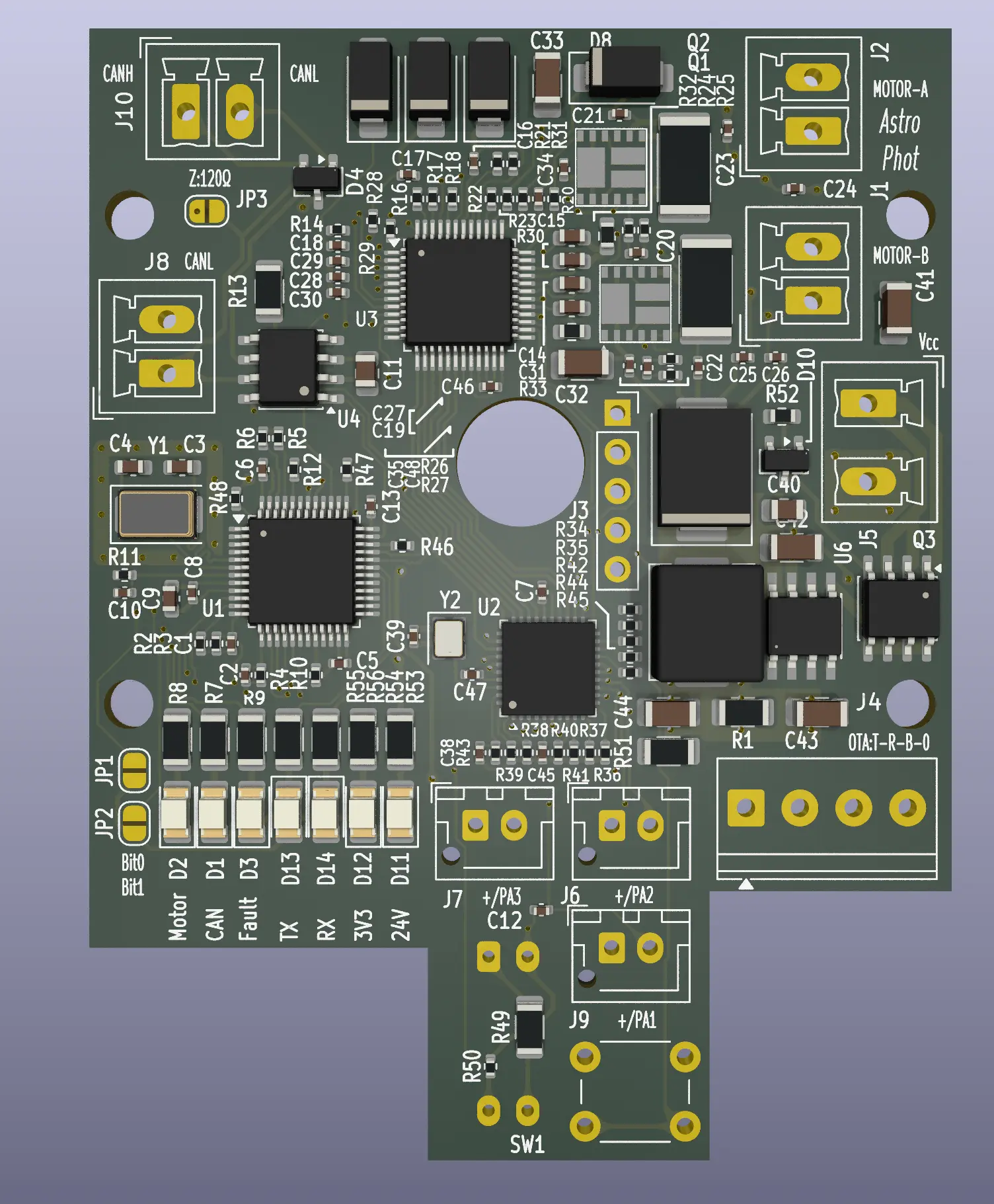
PCB 6 couches — Carte contrôleur NEMA23 — Vue 3D KiCad — Avril 2026
Composants principaux
Nomenclature carte moteur
| Réf | Composant | Référence | Rôle |
|---|---|---|---|
| U1 | MCU | STM32F103C8T6 (LQFP-48) | CAN natif + SPI + GPIO |
| U2 | Motion controller | TMC4361A-LA (QFN-40) | Rampes S-curve hardware |
| U3 | Gate driver | TMC2160-TA (TQFP-48) | Pilotage MOSFETs, StealthChop/SpreadCycle |
| Q1, Q2 | Pont H (×2) | DMHT6016LFJ (V-DFN5045-12) | Quad N-MOSFET, 1 boîtier = 1 phase |
| U4 | CAN transceiver | SN65HVD230 (SOIC-8) | 3,3V, 1 Mbps |
| U5 | Capteur optique | ITR9608-F | Fourche photo-interrupteur, homing |
| U6 | Buck converter | TPS5430DDA (SOIC-8 PowerPAD) | 24V → 3,3V, 500 mA max |
| Q3 | Protection inversion | SI4435DDY (SO-8) | P-MOSFET + Zener 12V |
| Y1 | Quartz | 8 MHz (3,2×2,5 mm SMD) | Horloge STM32 (PLL ×9 = 72 MHz) |
| Y2 | Oscillateur | SG-210STF 16 MHz CMOS | Horloge TMC4361A |
Chaîne d'alimentation
24V → Protection → Pont H + 3,3V logique
La protection contre l'inversion de polarité est assurée par un P-MOSFET SI4435DDY dont la grille est clampée à −12V par une Zener BZX84C12 (VGS max ±20V). En sortie, deux alimentations sont dérivées :
- 24V protégé : directement vers VS TMC2160 (bulk 100 µF) et les deux boîtiers DMHT6016LFJ
- 3,3V logique : TPS5430DDA — R1=34kΩ / R51=20kΩ → VOUT=3,30V, L1=47 µH, D9=B340, C_boot=10 nF, C_in=10 µF, C_out=2×22 µF
Budget courant 3,3V ≈ 165 mA : STM32 (30), TMC4361A (50), TMC2160 VCC_IO (10), SN65HVD230 (10), oscillateur (2), ITR9608-F LED (21), LEDs status (15), pull-ups (5), marge.
Chaîne de commande moteur
STM32 → TMC4361A → TMC2160 → DMHT6016LFJ → NEMA23
Le STM32 configure les paramètres de mouvement via SPI (PA4–PA7) vers le TMC4361A qui génère les rampes S-curve en hardware. Le TMC4361A pilote directement le TMC2160 via son propre bus SPI interne et les signaux STEP/DIR. Le TMC2160 commande enfin les grilles des MOSFETs DMHT6016LFJ avec les protections de la Fig. 3.5 du datasheet :
- 8× Rg 22Ω (gate resistors, ≤3 mm des MOSFET)
- 4× condensateurs bootstrap 470 nF (Fig. 3.8)
- 2× Rsense 75 mΩ 2512 → Imax = 2 A RMS, connexion Kelvin
- 4× R'G 0,68Ω + 4× SS14 (anti-undershoot BMA/BMB)
- 4× filtre RC 47Ω + 2,2 nF (SRAH/SRAL, SRBH/SRBL)
- 4× snubber 1 nF/100V sur sorties moteur
Profil de mouvement
- Poulie 20 dents, pas 3 mm → 60 mm/tour
- 51 200 µsteps/tour (200 pas × 256 µsteps)
- Course 2 000 mm → 1 706 667 µsteps
- Vmax ≈ 200 mm/s, Amax ≈ 100 mm/s² → trajet ≈ 11,4 s
- Zone décélération S-curve : 30–40 cm
Capteurs — Sécurité positive
Principe : fil coupé = LOW = STOP
Tous les capteurs utilisent un pull-down : une rupture de câble ou une déconnexion génère un LOW qui déclenche l'arrêt immédiat (sécurité positive, opposé à la sécurité par défaut HIGH).
| Pin | Capteur | Type | Filtre RC |
|---|---|---|---|
| PA0 | ITR9608-F (sur carte) | Fourche optique, homing | — |
| PA1 | Réserve J9 | Extensible | 10 kΩ + 100 nF |
| PA2 | Contact NC — J6 | Fin de course mécanique OUVERT | 10 kΩ + 100 nF |
| PA3 | Contact NC — J7 | Fin de course mécanique FERMÉ | 10 kΩ + 100 nF |
Communication
CAN bus daisy-chain — 1 Mbps
Le bus CAN relie les deux cartes moteur à l'ESP32 maître en topologie daisy-chain. Chaque carte dispose de deux borniers (J8a IN / J8b OUT) sur les mêmes nets CANH/CANL. La terminaison 120Ω est activée uniquement sur la dernière carte (JP3 fermé). L'adressage CAN est configuré par jumpers JP1/JP2 (2 bits, 4 adresses possibles).
Protection ESD : D4 PESD2CANFD24V-U au plus près de J8a. Transceiver SN65HVD230, Rs → GND (mode haute vitesse).
OTA UART (J4) — Flash STM32 par ESP32
L'ESP32 maître peut flasher le firmware STM32 à distance via la liaison UART. Séquence : ESP32 force BOOT0=HIGH via J4 pin 3, pulse NRST, le bootloader ROM démarre sur UART1 (PA9/PA10), flash réalisé, puis BOOT0=LOW et nouveau pulse NRST pour redémarrer en mode application. SW1 permet aussi le flash local en appuyant sur le bouton BOOT0.
PCB 6 couches
Empilement et règles de layout critiques
| Couche | Fonction | Contenu |
|---|---|---|
| 1 Top | Signal + composants | Sense Kelvin (sans via), quartz, SPI, gates, CAN |
| 2 | GND plan continu | Référence couche 1 |
| 3 | 3,3V plan | Alimentation logique |
| 4 | 24V + GND partiel | Zone puissance + fill GND |
| 5 | GND plan continu | Référence couche 6 |
| 6 Bottom | Signal + puissance | Pistes puissance, routage overflow |
- Pistes Kelvin (SRAH/SRAL/SRBH/SRBL/BMA/BMB) : même couche, pas de via
- Rg 22Ω : au plus près du DMHT6016LFJ (<3 mm)
- Quartz 8 MHz : garde GND annulaire + vias couture, zone exclusion 1 mm
- Exposed pads TMC2160 + TMC4361A : vias thermiques vers GND (min. 9)
- Séparation GNDA/GNDD : point unique de connexion sous le TMC2160
7 indicateurs LED de diagnostic
| Réf | Couleur | Signal | Comportement |
|---|---|---|---|
| D11 | Rouge | +24V présent | Allumée en permanence |
| D12 | Verte | +3,3V présent | Allumée en permanence |
| D1 | Jaune | PB12 — CAN actif | Clignote à chaque trame |
| D2 | Bleue | PB13 — Motor | Allumée pendant mouvement |
| D3 | Rouge | PB14 — Fault | Allumée sur erreur driver |
| D13 | Verte | PA9 — TX OTA | Active LOW sur UART |
| D14 | Jaune | PA10 — RX OTA | Active LOW sur UART |
Schéma électronique KiCad
Schéma complet — Session 5 — Avril 2026
Le schéma complet au format PDF (exporté depuis KiCad) couvre l'intégralité de la carte moteur NEMA23 : alimentation, protection d'inversion, STM32, TMC4361A, TMC2160, pont H DMHT6016LFJ avec protections Fig. 3.5, capteurs, CAN bus, interface OTA et indicateurs LED.
Session 5 — 10 avril 2026 — 5 sessions de conception
Un projet d'observatoire robotisé ?
Ce contrôleur NEMA23 est développé dans le cadre d'un projet d'observatoire astronomique personnel. Contactez-nous si vous souhaitez en savoir plus sur ce type de solution sur mesure.
Nous contacter